Positionering, hvad enten det er i forbindelse med en robot, eller en servo akse, tilføjer en stor mængde fleksibilitet til en produktionscelle eller linje. I mange tilfælde har robotleverandører integrerede løsninger med vision, en det sker, at disse løsninger ikke kan løse opgaven.
Vi hjælper også gerne med ekspertise i forbindelse med integrerede visionløsninger, men vi kan i sagens natur ikke kende alle systemer lige godt.
Conveyor tracking
For at få plads til at en robot kan gribe emnet, og man samtidig kan få et billede uden at robotten er i vejen, kan det være nødvendigt at introducere et transportbånd med tracking af emnet. Dette kan også give bedre output / hastighed.
Billedet viser bolte blive lokaliseret for opsamling med robot. Det interessante her er at boltene er til vindmølle vinger, så billedfeltet er 1200×900 millimeter. For at gøre systemet robust i forhold til snavs, så er belysningen indbygget i båndet – kaldet Backlight). Backlights i den størrelse er dog ikke en hyldevare, så det er speciallavet.

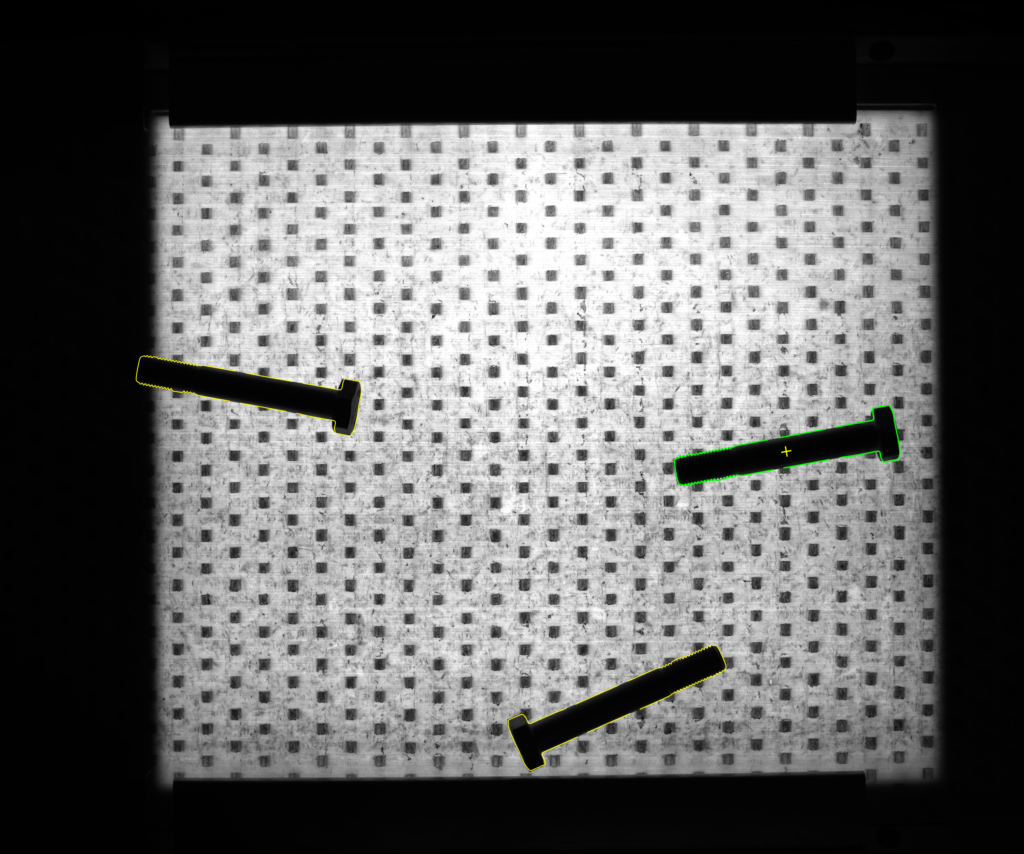
Så simpelt som det bliver – 1D
Hvis man skal spænde en møtrik i moment med en servoakse, men ikke kender rotationen af møtrikken på forhånd – Hvad gør man så?
For at være sikker på at “nøglen” går i indgreb med møtrikken, så kan man måle positionen først, så opnår motoren ikke falsk moment.
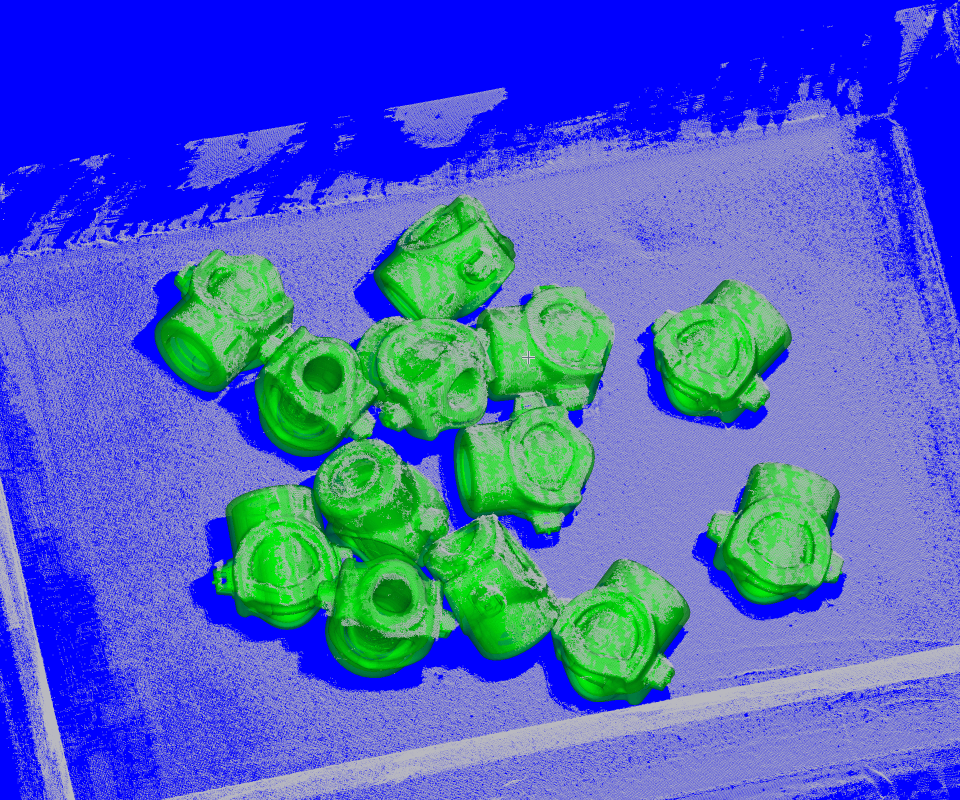
Den hellige gral – Binpicking
Det har i årevis været et mål at få en robot til at samle emner op direkte fra bulk. Erfaringsmæssigt er det stadigvæk en svær opgave, men ikke umulig. Teknologi og erfaringerne er efterhånden ved at være kommet så langt at denne type systemer kan laves indenfor fornuftige fysiske og økonomiske rammer.
Her vises hvordan en CAD model kan lokaliseres i en punktsky.